A15:ピエゾ製品を選定する際、精度を確認させていただく事がありますが、
精度には分解能や非直線性、繰返し位置決め精度、位置決め時の静止安定性などがあります。
弊社における位置決め精度の定義についてご説明させていただきます。
__________________________________________________
(1)分解能とは
ステップ応答の際などにおける最小のストロークを指します。
・オープンループ制御の場合
ピエゾ素子は理論上は印加された電圧の細かさによって分解能が決まります。
その為、使用される駆動用ピエゾドライバのノイズや発振器の分解能により決まります。
・クローズドループ制御の場合
弊社製品の場合、ひずみゲージセンサ又は静電容量型センサの分解能に依存します。
静電容量型センサは自社開発品となっており、ストローク(測長距離)が短くなるほど、分解能は高くなります。
__________________________________________________
(2)非直線性とは
フルストロークで変位させた際、どの程度の理想直線となっているかを測定した際の数値です。
弊社では、始点から終点(フルストローク)までの一定方向に順次位置決めを行い(往路)、
更に終点から始点まで同じように位置決めを行います(復路)。
それぞれの基準位置と実測変位量の差を測定。始点と終点の偏差を0に補正後、
その最大値と最小値の差に1/2を乗じ、±をつけた数値と定義しています。
・オープンループ制御の場合
センサ等を使わずフィードバック制御を行っていないので、ヒステリシス(変位動作の直線性)の
補正がされていませんので、入力信号に対する変位の直線性が悪くなります。
ヒステリシスについて詳細な説明が「Q5:オープンループとクローズドループでのヒステリシスの違い」に
ございますので、ご参考になれば幸いです。
・クローズドループ制御の場合
センサ等を使いフィードバック制御を行うことで、ヒステリシス(変位動作の直線性)が補正され、
位置決め精度を高めています。
弊社の場合、フルストロークの○○%となっております。
例えばフルストローク100μmのピエゾアクチュエータの非直線性が0.1%の場合、0~100μm変位させたときの
非直線性は0.1μmですが、0~50μm変位させた時も非直線性は0.1μmとなります。
__________________________________________________
(3)繰返し位置決め精度とは
同一の目標位置に対して繰返し位置決めを行ない、毎回のズレ量を測した数値の事です。
弊社では、任意の1点に同じ方向からの位置決めを7回繰り返すしその停止位置を外部変位計で計測して変位を求め、
最大誤差と最小誤差を足した値に1/2を乗じ、その値に±をつけた値を繰り返し位置決め精度と定義しています。
・オープンループ制御の場合
センサなどで外部から駆動部を測定していない為、ピエゾステージなどのカタログ値の変位量から駆動電圧換算し、
凡そどの程度変位しているかを推測する事はできますが、ヒステリシスの影響もあり、
正確な数値を求める事は出来ません。
・クローズドループ制御の場合
ひずみゲージセンサ又は静電容量型センサを使い、クローズループ制御している為、
繰り返し位置決め精度を数値で表す事が出来ます。
繰返し位置決め精度の数値は、センサの種類、変位量などにより変わりますので、製品カタログをご参照下さい。
__________________________________________________
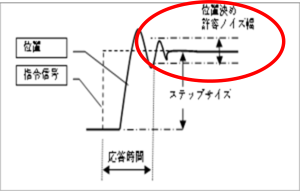
(4)位置決め時の静止安定性とは
指令信号(矩形波)による位置決め完了(電圧印可停止)後、どの程度の数値幅で安定しているかの数値となります。
下記図の位置決め許容ノイズ幅の部分となります。
・オープンループ制御の場合
クリープというピエゾ素子の物性があります。
クリープとは「目標とする変位への指令信号に対し、変位終了後も変位し続けてしまう」現象です。
その為、位置決め駆動後に静止し続けることは難しいです。
クリープの詳細については「Q6:オープンループとクローズドループでのクリープの違い」をご参照ください。
・クローズドループ制御の場合
ひずみゲージセンサや静電容量型センサを使用し、クローズドループ制御する事でクリープを補正し、
位置決め時の静止安定性を高めています。
ひずみゲージセンサや静電容量型センサの違いについて参考動画などがありますので、
「Q6:オープンループとクローズドループでのクリープの違い」をご参照いただければ幸いです。
__________________________________________________
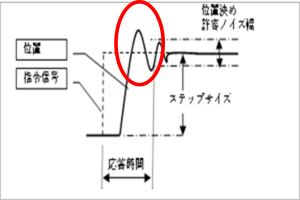
(5)静止までの時間とは
指令信号(矩形波)による駆動の場合、下記の図の様にオーバーシュートがでます。
このオーバーシュートは応答時間が早ければ早いほど、負荷が重ければ重いほど、オーバーシュートが大きくなります。
・オープンループ制御の場合
応答時間はピエゾドライバの出力電流により決まります。
ピエゾドライバの出力電流が大きくなればなるほど、応答速度がはやくなります。
しかし、センサ等を使用して制御していない為、オーバーシュートが大きくなったり、静止するまでの時間が掛かる可能性が高くなります。
仮に「M-26116」(平均出力電流100mA)と「M-26110」(平均電流500mA)で10μFのピエゾ素子を
フルストロークで駆動さた場合の応答速度は下記の計算式から求められます。
応答速度の求め方
t:応答速度 sec C :静電容量値 F I :電流値 A V :電圧 V
( C × V )÷ I=t
M-26116の場合
(10E-6×150)÷0.1=0.015 0.015sec
M-26110-1の場合
(10E-6×150)÷0.5=0.003 0.003sec
M-26116は0.015secとなり、M-26110-1は0.003secなので、M-26116よりもM-26110-1の方が早く駆動できますが、その分オーバーシュートが大きくなります。
・クローズドループ制御の場合
センサを使い、出来るだけオーバーシュートが出ないように制御するため、応答速度が遅くなります。
応答速度の目安ですが、凡そ共振周波数の1/10程度でクローズドループ制御されるので、仮に100gの負荷を載せた時の共振周波数が100Hzのピエゾステージの場合、
実際に駆動出来る応答速度は10Hz(100msec)程度となります。
共振周波数について詳細な説明が記載されている「Q8:ピエゾアクチュエータの共振周波数について」をご参考いただければと存じます。
__________________________________________________
他にもピエゾアクチュエータ、ピエゾステージについて説明させていただいているQ&Aや技術資料がございますので、
ご興味がございましたらご覧ください。
【 Q15:ピエゾアクチュエータ、ピエゾステージの位置決めの精度とは?】に関連があるQ&A
Q1:ピエゾアクチュエータを駆動するには?◆
Q2:オープンループ制御・クローズドループ制御とは?◆
Q5:オープンループとクローズドループでのヒステリシスの違い◆
Q6:オープンループとクローズドループでのクリープの違い◆
Q8:ピエゾアクチュエータの共振周波数について◆
Q9:ピエゾアクチュエータの発熱の問題について◆
Q12:ピエゾアクチュエータを選ぶのに必要な仕様条件◆
Q14:ピエゾアクチュエータの発生力と発生変位◆
Q16:ピエゾアクチュエータの固定について◆
Q17:ピエゾアクチュエータ(ピエゾ素子)の駆動方法について◆
Q22:矩形波(step波形)での駆動の際の注意点◆
Q26:ピエゾアクチュエーターとは◆
Q28:ピエゾアクチュエータの種類◆
ご使用方法についてご検討されていましたら、お気軽にご相談ください。
ご質問をお待ちしております。